正在加载内容,请稍等...
与传统的现浇结构相比,装配式混凝土建筑的结构构件由于采取工厂预制,其对现场的安装精度要求非常高,通常达到毫米级。当制作或施工达不到相关精度要求时,往往会导致建筑外观无法满足美观要求,严重者甚至会影响建筑质量安全。此外,由于预制构件往往体积、重量较大,其施工安装依靠人力往往无法完成,通常会利用施工机械,而这些施工机械的安装精度却很难达到毫米级的要求。因此,为使结构安装精度满足设计要求,施工过程往往费事费力。高精度的施工安装成了困扰装配式建筑发展的瓶颈之一,急需一种精确、快速地实现预制构件定位的方法或工艺来提高装配式混凝土建筑的施工安装效率,从而使得这种绿色建筑得以发挥其最大优势。
三维激光扫描技术(3D Laser Scanning Technology)是一种先进的全自动高精度点云立体扫描技术,是继GPS之后的又一项测绘新技术,已成为空间数据获取的重要手段。它是用三维激光扫描仪获取目标物表面各点的空间坐标,然后由获得的测量数据构造出目标物的三维模型。三维激光扫描技术近年来在建筑领域中得到一些应用,如三维激光扫描技术在上海中心建造中的应用,同济大学利用三维激光扫描仪检测墙面的平整度,广州市城市规划勘测设计研究院利用三维激光扫描仪测量建筑物立面,北京市测绘设计研宄院利用三维激光扫描仪对不规则钢结构样板段进行检测等。
目前在预制构件生产及施工现场吊装中使用三维激光扫描技术的还很少,主要原因在于新技术的使用尚处于研宄探索阶段,其次是针对具体的作业领域缺乏完整的解决方案。本文提出了一种基于三维激光扫描的装配式建筑构件高精度定位及数据修正技术,介绍了三维激光扫描技术在预制构件施工现场吊装中的作业流程、数据处理方法及数据分析方法,以及该新技术在装配式建筑中应用的优势。
工作流程
三维激光扫描技术在预制装配式建筑中的应用主要包括如下步骤,工作流程图如图2所示。
步骤1:对装配式预制构件进行三维扫描。装配式混凝土建筑中的预制构件通常包括墙、(叠合)楼板、(叠合)梁、柱、楼梯、(叠合)阳台板、空调板、女儿墙等。扫描的地点可以选择在构件的生产工厂、仓库或现场的堆放地,为避免相互干扰和提高工作效率一般选择在仓库进行扫描。
步骤2:建立预制构件的三维模型。根据步骤1获取的预制构件的三维扫描数据,建立三维模型,用专业软件将三维模型转换成BIM模型数据,与设计的CAD模型进行比对,寻找预制构件与设计模型的不同点,检测预制工厂生产的预制构件是否满足设计要求,如预制构件尺寸,预留钢筋的规格、数量、位置,灌浆套筒的规格、数量、位置,预埋件、吊环的规格、数量、位置等是否满足设计要求。
步骤3:对装配式建筑的施工现场进行三维扫描。本步骤的扫描目标物一般是指建筑的楼层平面,即预制墙、预制柱、叠合梁、叠合楼板等将要安放的平面位置。
步骤4:建立施工现场的三维模型。根据步骤3获取的三维扫描数据,建立三维模型,用专业软件将三维模型转换成BIM模型数据,与步骤2中预制构件的BIM模型进行模拟拼装,从而可以在预制构件现场吊装拼装前及时发现预制构件、主筋、箍筋、拉结筋、K支架等是否存在不合理碰撞,可以及时进行调整。
步骤5:对施工塔吊、起吊处构件进行三维扫描。本步骤扫描的点云数据需要与步骤3的数据进行空间拼接。通过拼接建立起点云数据之间的空间关系,可以计算塔吊的基本运行参数。
步骤6:基于扫描数据,对起吊处预制构件、工地现场和塔吊进行三维建模,分析三者之间的空间位置关系。本步骤中三维建模的目的是为了计算出起吊处预制构件、工地现场和塔吊中关键点的空间位置关系,即预制构件的吊点和定位点,工地现场的目标点以及塔吊的吊钩点,行程小车吊点以及塔吊的旋转轴线。
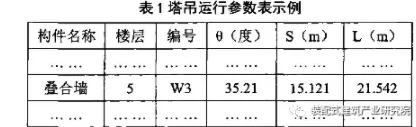
步骤7:计算吊装每个预制构件所对应的塔吊运行参数(如图1所示悬臂转角0、小车行程S、吊索下放长度L)。本步骤中所涉及到的塔吊运行参数(悬臂转角0、小车行程S、吊索下放长度L)均是相对量,即需要先确定一个参考值才能计算出悬臂转角0、小车行程S、吊索下放长度L。参考值的确定也是方便的,例如可以设定现场某一点为悬臂转角的起点、设定悬臂上某一具体位置为小车行程的零点和吊索上某一具体位置为下放长度的起点。基于这些参考值,通过三维建模软件可以给出每个构件的塔吊运行的具体参数。

图一塔吊运行参数定义
步骤8:将第7步骤中计算得到的塔吊运行参数制表,操作人员严格按该表操作塔吊,或通过数控编程驱动数字化塔吊的自动运行。
步骤9:吊装过程中对塔吊运行参数进行修正。预制构件吊装过程中,由于部分构件自重较大,塔吊产生变形;存在风等其它外在因素的影响,使得塔吊实际运行参数与理论值产生一定的偏差,需对其修正。在整个吊装过程中,对塔吊吊点进行扫描,从而对塔吊运行参数时时进行修正,实现预制构件的髙精度安装。
步骤10:构件吊装完成后,在施工现场进行三维扫描,对完成吊装的构件进行检测(如外墙板垂直度检测、外墙板轴线位置、外墙板两板对接缝、相邻楼板高低差检测等)。
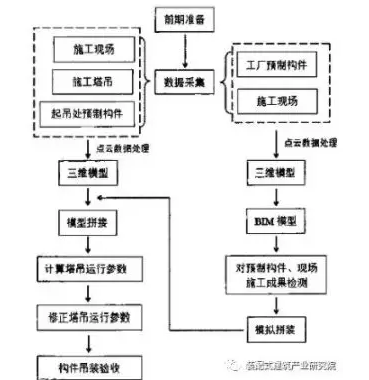
图2 基于三维激光扫描的装配式混凝土建筑预制构件高精度定位及数据修正技术工作流程图
三维扫描的实施
在预制构件加工厂对预制构件进行三维激光扫描,由于预制构件数量较多,故同种规格的构件扫描一个或几个。扫描预制构件时应避免构件被遮挡。
对施工现场进行三维扫描,全部扫描过程共设6个测站点,在对立面进行扫描时,仪器的分辨率设置为,50m处的扫描分辨率为20mm,按照测站距离目标最远30m计算,采样间隔小于对楼层平面进行扫描,内部扫描距离较近,可设置为50m处的扫描分辨率为10mm,按照测站距离目标约为10m计算,楼面采样间隔达到2mm。
在测站点设置完成后,需要在各个位置方向放置同名点,即粘贴反射物。
采集过程大致分为以下四个步骤:
1、粘贴反射体
本次扫描中站点较少,可以采用公共反射体的方式进行拼接,要注意让反射体分布均匀,它包括方向上的均匀和层次上的错落。每个站点的有效发射体个数不少于3个,在条件允许的情况下可以尽可能多的设置反射体,这将减小数据拼接的误差。本次扫描选择贴在各个柱子上,同时保证高低错落。
2、连接设备
根据扫描仪的0>地址,配置笔记本电脑的无线网络。之前需要应用三维激光扫描仪附带的软件创建一个project。
3、扫描仪参数设置
对扫描仪的参数进行设置,包括设定扫描目标的采样间距,需要综合考虑扫描的采样密度、扫描时间,最终确定采样点间距。还包括扫描次数、水平起始和停止角度、垂直角度、分辨率、显示方式等等。
4、数据采集
在第一个测站进行粗扫,如果结果显示符合要求,再设置高精度分辨率进行精扫。按照这样的方法依次从站点1到站点6进行扫描,从而最终获取立体三维数据。扫描过程中需要注意捕捉反射体。
对施工塔吊、起吊处的预制构件按照同样的方法进行三维扫描,由于每一个构件的起吊位置都不同,所以需对起吊处的所有构件进行扫描。
如图3所示,在生产工厂预制构件堆放处对预制构件进行三维激光扫描,图4为在施工现场进行三维扫描,图5为采集的三维点云数据。
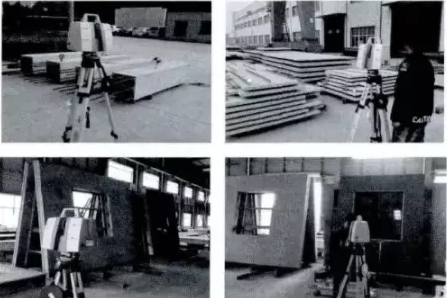
图三对生产工厂预制构件进行三维扫描

图四对装配式建筑的施工现场进行三维扫描

图五三维扫描点云数据
外业采集过程中由于扫描仪以及其他各方面的因素,噪声点的存在是不可避免的。而噪声点对三维模型的建立有很大的影响。在进行点云数据处理之前要降低或消除噪声,和目标无关的部分可视为噪声一并除去。
要得到完整的三维模型,还须将各个站点扫描的三维数据配准到统一的坐标系中。通过同名点的设置来对不同坐标系下的三维数据进行拼接,需要保证同名点的个数不少于三个。拼接后的数据还可以进一步简化和处理,输出不同格式的数据。
模型建立的过程就是利用点云数据进行计算,拟合的过程,比如一面墙的点云,利用平面拟合算法可以拟合出一面墙。如果是一个管道或圆柱体表面点云,通过曲面拟合算法生成管道或圆柱体。这个各个构件组合在一起就形成了整个模型。
图6-8为经过点云数据处理的预制构件、楼面、塔吊三维模型,经过三维模型拼接,形成如图9所示的装配式建筑现场三维模型。

图八塔吊三维模型 图九装配式建筑现场三维模型
预制构件吊装过程中的高精度定位及数据修正技术
对起吊处的预制构件进行三维激光扫描,将其三维点云数据与施工现场以及塔吊的三维点云数据进行空间拼接,通过拼接建立起点云数据之间的空间关系,可以计算塔吊的基本运行参数。
基于上述扫描数据,对起吊处预制构件、工地现场和塔吊进行三维建模,分析三者之间的空间位置关系。三维建模的目的是为了计算出起吊处预制构件、工地现场和塔吊中关键点的空间位置关系,即预制构件的吊点和定位点,施工现场的目标点以及塔吊的吊钩点,行程小车吊点以及塔吊的旋转轴线。
根据起吊处预制构件、工地现场和塔吊中关键点的空间位置关系,通过相关软件可以计算出吊装每个预制构件所对应的塔吊运行参数(如图1所示悬臂转角0、小车行程S、吊索下放长度L)。塔吊运行参数是相对量,即需要先确定一个参考值才能计算出悬臂转角0、小车行程S、吊索下放长度L。例如可以设定现场某一点为悬臂转角的起点、设定悬臂上某一具体位置为小车行程的零点和吊索上某一具体位置为下放长度的起点。基于这些参考值,通过三维建模软件可以得到每个预制构件的塔吊运行参数。将塔吊运行参数制表(如表1所示),塔吊操作人员按照该表中的参数操作塔吊,或通过数控编程驱动数字化塔吊的自动运行,数字化塔吊控制系统如图10所示。
预制构件在吊装过程中,在预制构件自重下构件和塔吊均会产生变形,同时预制构件和塔吊在风荷载作用下产生变形,使得塔吊实际运行参数与理论值产生一定的偏差,要实现构件高精度定位需对塔吊运行参数进行修正。在吊装过程中,对塔吊吊点进行扫描,通过相关软件计算分析对塔吊运行参数进行修正(悬臂转角小车行程S'、吊索下放长度L'),从而实现预制构件的高精度定位。
为了可以控制塔吊将预制构件吊装到指定的位置,根据前面建立的模型设计了一个可由参数化控制的吊装程序,并输出塔吊的控制数据(θ’(角度),d’(长度),s’(高度))。
利用三维软件Rhino,其包括一个应用插件Grasshopper,插件Grasshopper中包括一个可供使用的应用程序Firefly。假设吊装工具为由数个伺服电机控制的塔吊,其机械结构中的活动关节与所述虚拟模型的关节点和位移点对应。伺服电机受微控制单元控制,微控制单元接受到三维模型发送的变化的角度信息后,控制伺服电机对吊装工具进行角度和位移控制,角度控制为塔吊控制其转台,位移控制为塔吊控制其吊钩和小车。
具体过程如图10所示,首先在Rhino中调用插件Grasshopper,再通过程序Firefly打开Grasshopper与微控制单元ARDUINO的连接,然后在Rhino中进行虚拟的吊装操作,插件Grasshopper接收到Rhino发出的指令后通过程序Firefly将虚拟指令转化成为微控制单元可以识别的代码程序,然后发送给微控制单元的控制程序,最后通过无线将控制程序发送给微控制单元,由微控制单元对伺服电机进行控制。
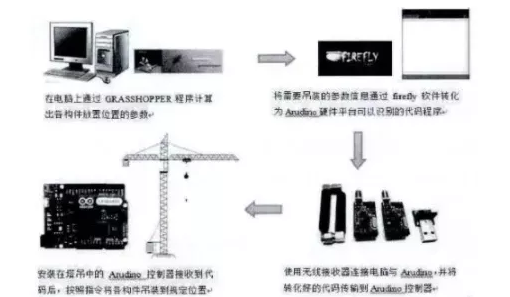
图10参数化塔吊控制流程图
结论
本文提出了基于三维激光扫描的装配式混凝土建筑预制构件高精度定位与数据修正技术,详细介绍了这项新技术的整个工作流程和具体的操作步骤。与传统通用方法相比,具有以下优势:
(1)提髙了对预制构件尺寸检测的工作效率。
(2)提高了对现场施工成果检测的工作效率,降低了现场工作人员的工作量。可以直接在图像上标示,而无需再进行纸上记录;可以直接得到扫描结果与设计模型的偏差,而无需先测量、后对照图纸、最后确认偏差。
(3)精简现场工作。只需在现场进行扫描工作,数据处理和对比偏差可在室内完成,降低了劳动强度。
(4)方便相关人员在现场的测量工作。可利用像素测量、点云测量技术,完成一些费力、高危险部位的测量。
(5)完善施工人员的沟通方式。可以直接利用直观的图像、视频、转换后的BIM模型进行沟通。
(6)利用高精度的激光扫描获得毫米级的原始数据,保证了后期的安装精度。
(7)将计算机精确计算结果替代传统依靠人工目视判别准确度,提高施工安装的工作效率。
(8)采用数控编程驱动数字化塔吊的工作将进一步提高施工自动化。
本文提出了基于三维激光扫描的装配式建筑构件高精度定位及数据修正技术。详细介绍了三维激光扫描技术在装配式建筑中的应用,主要包括在装配式建筑中三维扫描的实施、三维点云数据的拼接、预制构件及施工现场成果质量检测、模拟现场拼装、预制构件吊装过程中的高精度定位及数据修正等,分析了这项新技术在装配式建筑中应用的优势。
(责任编辑:何雯丽)

延伸阅读:
新型装配式钢节点混合框架结构及配套体系关键技术研究与应用 装配式混凝土建筑设计协同管控要点 基于制造和装配的设计让预制装配式建筑的优势日益凸显(1) 凡本网注明“来源:预制建筑网”的所有资料版权均为预制建筑网独家所有,任何媒体、网站或个人在转载使用时必须注明来源“预制建筑网”,违反者本网将依法追究责任。 (2) 本网转载并注明其他来源的稿件,是本着为读者传递更多信息之目的,并不意味着赞同其观点或证实其内容的真实性,请读者仅作参考,并请自行核实相关内容。其他媒体、网站或个人从本网转载使用时,必须保留本网注明的稿件来源,禁止擅自篡改稿件来源,并自负版权等法律责任,违反者本网也将依法追究责任。 (3) 如本网转载稿涉及版权等问题,请作者一周内书面来函联系。
[责任编辑:Susan]